6 - Les programmes de satellites
6.3 - L'observation de la Terre
Les préliminaires
Les premières études de radars embarqués à
bord de satellites entreprises par le Département Espace-Satellites
(DSP puis ESA) de Thomson-CSF remontent à 1973.
Le Département fait, à cette époque, partie de
la Division AVS (Avionique et Spatiale). Ce rattachement facilite grandement
la coopération technique avec les spécialistes de cette Division
qui mènent des études de SAR (Synthetic Aperture Radar :
radar à ouverture synthétique) embarqués sur avions.
C'est ainsi que de nombreux marchés d'étude peuvent être
gagnés pour la plus grande partie à l'ESRO/ESA mais également
au CNES et, plus tard, à la DTEN. Thomson-CSF devient rapidement
le seul industriel européen connaissant bien le SAR.
Durant l'année 1973, de janvier à novembre, le contrat
Sarsat, passé par l'ESRO, conclut à la faisabilité,
en 1980-85, à bord d'un satellite en orbite basse (567 kilomètres),
d'un radar latéral opérant à 10 GHz, balayant au sol
une bande (fauchée) de 80 kilomètres de large avec une résolution
de 50 x 50 mètres. Sa durée de vie prévue est de deux
ans.
En janvier 1974, un contrat de l'ESRO, baptisé Sarlab, permet
d'examiner la possibilité d'exploiter différentes charges
utiles radar à bord de la navette spatiale à partir de 1980.
Ces charges doivent avoir pour but d'effectuer des essais technologiques
dans l'espace et également de tester les performances des matériels
sur des «zones tests» au sol, afin de permettre aux scientifiques
de préciser leurs exigences.
Les conclusions de cette étude sont présentées
à un symposium organisé par l'université du Michigan
aux États-Unis.
Les études sont pilotées par le Service Systèmes
de DSP, dirigé par Claude Skenderoff, avec la participation de la
Division AVS pour les radars et leurs antennes et de la société
italienne Montedel, devenue plus tard Laben, pour le traitement de l'information.
En plus de sa maîtrise d'oeuvre système, DSP se charge de la
partie transmission.
Après une période de calme, à partir de 1978, une
série de marchés d'études sont à nouveau gagnés
par DSP, le concurrent principal pour ceux de l'ESA étant la société
britannique MSDS (Marconi Space and Defense Systems). La maîtrise
d'oeuvre est assurée par le Service SS2, dirigé par Jean-Claude
Héraud, qui a été créé en juin 1977
à la suite de la scission en deux de l'ancien Service Systèmes.
Bien que le Département DSP ait été, à partir
de 1975, rattaché non plus à la Division AVS mais à
la Division DFH, la collaboration avec la Division AVS se poursuit normalement.
Trois études sont menées en 1978 :
- Pour l'ESA
En collaboration avec AVS et CIMSA (filiale informatique de Thomson-CSF),
une étude sur le traitement des signaux de Seasat-A, projet
de satellite radar destiné à l'observation des océans.
- Pour le CNES
En collaboration avec AVS, étude de la compatibilité entre
un SAR et la plate-forme de SPOT.
- Pour l'ESA
Ce qui est le début du programme ERS, une étude
de phase A d'un satellite européen d'observation utilisant un SAR
est notifiée le 18 avril 1978. Les coopérants de DSP y sont
AVS, la société italienne Selenia et la société
allemande Dornier, futur maître d'oeuvre du programme ERS.
Le chef de projet est Jean Rozes.
Une étude de phase A concurrente est menée par MSDS. Suite
à cette phase A, DSP obtient de l'ESA, en 1979-80, des marchés
d'étude complémentaires au niveau du système, ainsi
qu'un marché pour une maquette simplifiée d'antenne pour
la validation du programme de calcul.
Dans le même domaine, la Division ASM (Acoustique Sous-Marine)
de Thomson-CSF obtient en 1980 un marché portant sur la préévaluation
technologique de filtres dispersifs à onde de surface, et la Division
Tubes Électroniques, associée à Selenia, obtient en
1979 un marché d'étude prospective sur les amplificateurs
pulsés.
Enfin, la DTEN (Direction Technique des Engins) manifeste son intérêt
dans le domaine en 1978 en confiant à DSP un marché d'étude
de missions SAR à des fins militaires.
Le programme ERS 1
 C'est
en 1981 que le Conseil de l'ESA, tenant compte des études de phase
A effectuées dans le cadre d'un programme préparatoire, décide
de mettre en oeuvre un programme optionnel de satellite d'observation de
la Terre par des moyens radioélectriques, y compris le segment sol
correspondant. Dans un programme dit «optionnel», les États
membres sont libres de fixer le pourcentage selon lequel ils participent
financièrement, et le programme ne peut démarrer que si le
total des pourcentages atteint ou dépasse un seuil minimum habituellement
au moins égal à 90 %, les quelques pour cent manquants faisant
alors l'objet d'une négociation. C'est
en 1981 que le Conseil de l'ESA, tenant compte des études de phase
A effectuées dans le cadre d'un programme préparatoire, décide
de mettre en oeuvre un programme optionnel de satellite d'observation de
la Terre par des moyens radioélectriques, y compris le segment sol
correspondant. Dans un programme dit «optionnel», les États
membres sont libres de fixer le pourcentage selon lequel ils participent
financièrement, et le programme ne peut démarrer que si le
total des pourcentages atteint ou dépasse un seuil minimum habituellement
au moins égal à 90 %, les quelques pour cent manquants faisant
alors l'objet d'une négociation.
La France a décidé de participer au programme avec une
part assez importante, de l'ordre de 20 à 25 %. Malheureusement
pour Thomson-CSF, le CNES a proposé et obtenu, afin de réduire
les coûts de développement de la plate-forme, d'utiliser pour
ERS
celle, déjà développée, de SPOT, sous
la maîtrise d'oeuvre de MATRA.
Compte tenu de cet engagement, le reste de la contribution française
est très insuffisant pour qu'une société française,
en l'occurrence Thomson-CSF, puisse prétendre à la maîtrise
d'oeuvre du SAR, qui doit être la partie principale de la charge utile.
La porte s'ouvre donc pour que le seul concurrent déclaré
pour cette maîtrise d'oeuvre, MSDS, l'obtienne sans compétition.
Tenant compte de ce fait, et quelque regrettable qu'il soit, la Direction
de DSP cherche à se positionner pour obtenir au moins quelques fournitures
d'équipements dans le SAR.
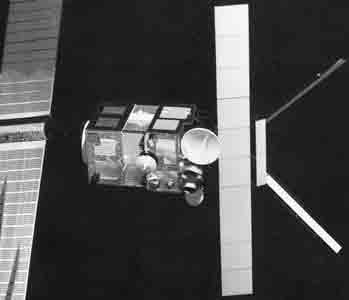
La charge utile
Au début de 1981, la charge utile d'ERS est définie
pour assurer trois missions :
- AMI (Active Microwave Imagery) ;
- altimètre ;
- OCM (Ocean Color Monitoring).
L'AMI comprend deux instruments, le SAR et le «wind scatterometer»
(diffusiomètre). Le SAR a pour missions : l'observation du champ
de vagues des océans, l'analyse de la banquise et une mission expérimentale
d'imagerie terrestre. Ce radar à visée latérale et
à ouverture synthétique fonctionne en bande C (5,3 GHz).

Le «wind scatterometer» est un radar à ouverture
réelle utilisable uniquement sur l'eau. Il doit effectuer des mesures
sur l'interface air-mer, sa mission étant complémentaire
de celle du SAR avec lequel certains équipements peuvent être
mis en commun.
L'altimètre, radar fonctionnant en bande Ku (13,8 GHz), doit
mesurer la hauteur des vagues. Au début de la phase B, sa présence
à bord n'est pas garantie, il risque d'être éliminé
pour des raisons budgétaires. Il est, malgré tout, maintenu
dans la mission finale.
L'OCM doit utiliser un radiomètre passif multispectral, en particulier
dans l'infrarouge, et ayant une faible résolution (de l'ordre de
800 mètres).
Un examen des compétences de DSP ainsi que de celles de la concurrence
confirme que l'objectif doit être, avec l'aide des spécialistes
de la Division AVS, d'obtenir la responsabilité d'un ou plusieurs
sous-systèmes du SAR et la fourniture des équipements correspondants.
La phase B
 À
la fin de 1981, l'ESA se trouve en possession des résultats d'études
de phase A pour l'ensemble du satellite et pour la charge utile et ses
différents éléments. À
la fin de 1981, l'ESA se trouve en possession des résultats d'études
de phase A pour l'ensemble du satellite et pour la charge utile et ses
différents éléments.
Le coût du programme est évalué à 450 MUC,
dont 280 pour le satellite. Le principal candidat pour la maîtrise
d'oeuvre du programme est Dornier.
Les avant-projets pour l'AMI, établis aussi bien par Thomson-CSF
que par MSDS, ont montré que le SAR et le diffusiomètre peuvent
comprendre un certain nombre d'éléments en commun et doivent
donc être considérés comme faisant partie d'un ensemble
unique exploité selon plusieurs modes.
La pression de l'Allemagne, dont la participation financière
au programme est majeure, incite l'ESA à désigner Dornier
comme maître d'oeuvre sans mettre cette fonction en compétition.
Concernant l'AMI, le Département DSP de Thomson-CSF décide
de s'allier à MSDS, qui est candidat à sa maîtrise
d'oeuvre.
Au cours d'une réunion tenue le 6 janvier 1982 entre sir Peter
Anson, de MSDS, assisté de Ian Mac Millan, et Jacques Chaumeron,
Directeur de DSP, assisté de Jean-Claude Héraud et Yves Farbos,
il est conclu et enregistré que les deux sociétés
ont décidé de s'allier pour la phase B de l'AMI et souhaitent,
pour des raisons économiques évidentes, n'avoir à
préparer de futures propositions qu'à destination d'un seul
maître d'oeuvre pour le satellite.
Suit alors un projet de partage des tâches et des fournitures,
étant entendu que certains matériels peuvent être mis
en compétition hors des deux sociétés, afin de satisfaire
la loi du «juste retour» de l'ESA.
MSDS, maître d'oeuvre de l'AMI, accepte de partager à 50
% avec Thomson-CSF les tâches d'ingénierie du système.
Pour les équipements, dans les grandes lignes, Thomson-CSF doit
prendre la responsabilité de la partie radio-fréquences alors
que MSDS se charge des matériels de traitement des signaux ainsi
que de l'alimentation électrique.
La phase B commence en août 1982. Le chef de projet à DSP
est Jean-Claude Anne, succédant à Jean Rozes qui n'a pas
souhaité suivre le Département à Toulouse.
Dornier est maître d'oeuvre de l'ensemble du satellite et MSDS
(Marconi) est maître d'oeuvre de l'AMI.
Dans ce dernier, Thomson-CSF a la responsabilité de cinq sous-systèmes
:
- radio-fréquences (RF) ;
- amplificateur de puissance (HPA) ;
- calibrage ;
- «wind scatterometer» ;
- antenne.

|
|
L'équipe ERS 1 en 1984-1985. De gauche à droite Dominique
Marquet, Christian bassoua, Robert Rouy, Claude Argagnon, Jean bouguet,
Jean-Benoît Nocaudie, François Witrand, X., Jacques Osier,
Patrick Martinot, Isabelle Polesel et Yvon Menard
|
À la Division DES, quelques difficultés apparaissent dans
la mise en place d'une équipe de projet suffisante, la surcharge
de travail des ingénieurs, chronique depuis 1980, n'étant
pas encore résorbée, et la perspective de défections
à l'occasion du transfert à Toulouse n'autorise aucun optimisme
dans ce domaine.
À partir de la première revue du programme, la revue préliminaire
tenue en décembre 1982, il est demandé à chacun des
coopérants de fournir des estimations budgétaires des phases
C/D pour les éléments dont il est responsable.
Bien qu'il soit assez habituel, dans ce genre de programme, que l'examen
des premières estimations donne lieu à des passes d'armes
entre le maître d'oeuvre et ses sous-traitants, il faut bien constater
que ces dernières atteignent des sommets dans le cas du programme
ERS.
Incluant celle fournie par Thomson-CSF pour sa propre part, la première
estimation fournie par MSDS pour l'AMI atteint près du double de
l'objectif de 70 MUC, l'objectif de prix pour le satellite complet étant
de 230 MUC.
Thomson-CSF devient rapidement le bouc émissaire et se voit accusé
d'être le principal responsable de ces dépassements.
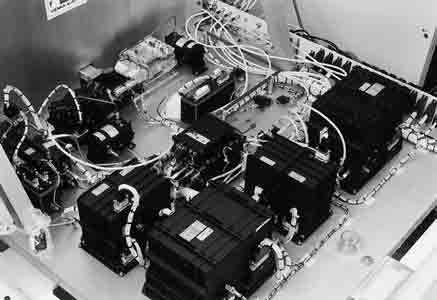
|
|
Sous-système radio-fréquence (RF Sub-System) d'ERS
|
C'est là le danger habituel d'avoir à établir des
estimations de prix alors que l'avancement technique des études
de phase B ne fournit pas encore une définition suffisante des matériels.
Ce danger, que Thomson-CSF a, à la suite d'expériences passées,
probablement mieux perçu que MSDS, résulte du fait d'avoir
à «naviguer», à ce stade du programme, entre
deux positions extrêmes.
L'une consiste à présenter des estimations «tirées
vers le bas» afin d'éviter un arrêt du programme par
l'ESA, en raison d'un manque de ressources, mais avec le risque évident
de se voir opposer ces estimations par le client lors de la négociation
des prix de la phase C/D.
L'autre, choisie par Thomson-CSF, consiste, à partir de bases
les plus réalistes possibles, à prendre une certaine marge
de sécurité pour s'assurer contre le phénomène
bien connu qui voit les prix augmenter progressivement lorsque les études
révèlent des difficultés techniques non prévues
au départ. Au cas très improbable où une partie de
ces marges subsisterait après la fin de la phase B, elle serait
fatalement éliminée au cours de la négociation de
la phase C/D.
Le maître d'oeuvre Dornier, qui se voit répéter par
l'ESA que, s'il devait coûter trop cher, «son» programme
risquerait d'être abandonné, fait bien entendu pression sur
son sous-traitant MSDS pour «tirer vers le bas» les estimations.
Tout en défendant ses propres estimations, MSDS répercute
cette pression sur son sous-traitant Thomson-CSF, et même sur Dornier,
qui est son sous-traitant pour l'antenne du SAR.
De revue de programme en revue de programme, de «management meetings»
en «management meetings», les discussions orageuses se poursuivent
entre les trois partenaires, accompagnées d'échanges de lettres
et de Télex aigres-doux.
Lorsqu'on commence à discuter des plannings de la future phase
C/D, Thomson-CSF se retrouve dans la même position, accusée
de saboter le programme en affichant des délais trop longs. Visiblement,
ni Dornier ni MSDS ne sont en mesure d'apprécier, à ce stade,
que la partie des matériels dont Thomson-CSF doit assumer la responsabilité
est celle qui présente le plus d'innovations et de difficultés
techniques et technologiques.
Sur le plan technique, après un début difficile, l'équipe
qui a été constituée sous la direction de Jean-Claude
Anne réussit, à partir de la revue intermédiaire des
25 et 26 février 1983, à assurer de bonnes prestations, malgré
quelques problèmes de compréhension avec l'équipe
de MSDS qui finissent par être résolus grâce à
un travail en «colocation» à Portsmouth.
Jean-Benoît Nocaudie, devenu le commerçant de l'affaire,
succédant à Yvan Farbos qui n'a pas souhaité suivre
le Département DSP à Toulouse, mène, en équipe
soudée avec Jean-Claude Anne, la bataille des négociations
de prix. Son chef de service, Alain Roger, avec son dynamisme bien connu,
lui apporte son soutien dans les «coups durs».
Une proposition perdue
et regagnée
À partir de mars 1983, MSDS fait savoir que, suite à
des consignes de l'ESA, il va consulter d'autres industriels que Thomson-CSF
pour les équipements du sous-système RF.
Thomson-CSF demande à être informée de ces consultations
en faisant remarquer qu'elles sont contraires à l'accord du 6 janvier
1982.
En avril, MSDS communique la liste des sociétés qu'il
prévoit de consulter pour tous les matériels initialement
affectés à Thomson-CSF :
- sous-système RF : Thomson/SPAR ;
- sous-système calibrage : Thomson/SPAR/LM Ericsson ;
- amplificateur de puissance (NPA) : Thomson/Dornier ;
- antenne du scatterometer : Thomson/LM Ericsson.
Depuis février 1983, Thomson-CSF a renforcé, pour le programme
ERS,
ses relations avec le CNES. Des réunions d'information ont lieu
à Paris et à Toulouse. Le CNES, tenu au courant du déroulement
et des difficultés de l'affaire, accepte de soutenir financièrement
Thomson-CSF sur les technologies qui l'intéressent.
Les pourparlers se poursuivent jusqu'en juillet 1983 et il est finalement
décidé que le CNES passera un certain nombre de marchés
d'étude sur divers points critiques des sous-systèmes RF
et calibration, pour un montant global d'environ 5 MUC, et s'étalant
jusqu'à fin 1985. Ce montant doit venir en déduction du prix
de la proposition pour la phase C/D qui sera remise à l'ESA via
MSDS.
Pendant ce temps, la phase B se poursuit et s'achève par une
revue finale les 8 et 9 mai 1983 à Toulouse.
Les équipes technique et commerciale de DES entament alors le
travail de préparation des propositions pour la phase C/D, qui sont
remises à MSDS le 15 juillet. Le seul concurrent qui apparaît
alors est SPAR.
L'essentiel des exposés techniques qui doivent faire partie de
ces propositions est contenu dans le rapport de fin de phase B, et il a
donc été convenu avec MSDS que seules seraient remises une
mise à jour de ce rapport ainsi qu'une matrice de conformité.
C'est une erreur funeste, car les propositions sont examinées à
l'ESA par un comité extérieur à l'équipe de
projet, qui n'est apparemment pas en possession du rapport de fin de phase
B.
La proposition de Thomson-CSF est donc jugée par ce comité
comme beaucoup moins complète que celle de SPAR qui, n'ayant pas
participé à la phase B, a fourni un document beaucoup plus
détaillé.
Par ailleurs, les prix de Thomson-CSF et de SPAR dépassent l'objectif
fixé par MSDS, mais Thomson-CSF est nettement plus chère
que SPAR qui, encore en raison de sa non-participation à la phase
B, n'a peut-être pas anticipé toutes les difficultés
du programme.
Pour toutes ces raisons, Thomson-CSF se trouve éliminée
du programme ERS. L'énorme malentendu dont elle a été
victime lors de la préparation de la proposition ne peut que susciter
de sa part de violentes protestations auxquelles le CNES accepte de souscrire.
Après un certain nombre de discussions, une réunion à
haut niveau est organisée à l'ESA, le 12 septembre, entre
des représentants de l'ESA, du CNES, de Dornier, de MSDS et de Thomson-CSF.
Vingt-deux personnes se trouvent autour de la table, parmi lesquelles
Jean-Marie Luton, Directeur Général adjoint du CNES, le Dr
Pfeiffer, chef du projet ERS à l'ESA, le Dr Ulke,
membre du directoire de Dornier Systems, et Jacques Imbert, alors Directeur
de la branche Télécommunications de Thomson-CSF. Seul MSDS
n'a pas envoyé de directeur. Sa délégation est composée
du chef de projet ERS, Ian Mac Millan, et du commerçant de
l'affaire, M. Ellingham.
Dans la délégation de Thomson-CSF, Jacques Imbert est
assisté de Gérard Coffinet, Jacques Chaumeron, Alain Roger,
Jean-Claude Héraud et Jean-Claude Anne, tous de la Division DES,
ainsi que d'un juriste du siège social, car on ne prend jamais assez
de précautions dans une telle affaire.
Après que chacune des parties a exposé son point de vue
et que les discussions se sont poursuivies pendant près de deux
heures, il apparaît clairement que la France ne participera probablement
pas au financement d'ERS si Thomson-CSF n'est pas retenue pour la
fourniture d'une part «substantielle» de l'AMI. C'est un risque
mortel pour le programme.
Devant cette constatation, le débat est rapidement clos et il
est demandé à Thomson-CSF de fournir, dans un délai
de cinq semaines, une proposition, cette fois-ci complète et conforme
aux critères de l'ESA. Un échange de lettres entre les différents
dirigeants confirme ensuite cet accord.
La fin de l'été, qui coïncide avec le transfert de
l'ensemble de la Division DES de Thomson-CSF à Toulouse, est donc
consacrée à la réécriture de cette proposition.
Jean-Claude Anne conduit cette opération avec trois sous-systèmes
de l'AMI en vue : le «RF subsystem» - le coeur du radar, générant
les impulsions et les recevant - (responsable technique Benoît Durand,
avec le soutien de Jacques Richard, pour les problèmes de traitement
du signal) ; le «calibration subsystem», dont la fonction est
de permettre l'exploitation des images radar grâce à des références
stables (responsable Yvon Menard) ; enfin, le «HPA, High Power Amplifier»,
tube bande C capable de délivrer des impulsions de 5 kW crête,
et son ensemble d'alimentation (responsable technique Alain Corain).
Cet été d'efforts laissera quelques souvenirs tenaces
au sein de l'équipe, parmi lesquels les visites de Philippe Blanchet,
venu soutenir le moral des troupes qui n'ont ni horaires ni week-ends,
comme il se doit !
L'effort n'aura pas été vain car Thomson-CSF/DES se voit
attribuer deux des trois sous-systèmes : le «RF» et
la «calibration», Dornier se réservant le «HPA».
Cette satisfaction est très théorique et à court
terme, car ERS ne démarre pas, faute de financement. Après
une extension de la phase B, pour quelques semaines, l'ESA se voit obligée
de renoncer au financement de certaines équipes, dont celle de Thomson-CSF.
La version finale de la proposition de DSP a été livrée
le 17 octobre 1983. Elle est particulièrement volumineuse si l'on
en croit les chiffres révélés à l'époque
par le chef de projet :
- poids d'un exemplaire : 53 kilos ;
- hauteur de la pile : 1,5 mètre ;
- nombre total de classeurs utilisés : 325 gros, 50 moyens, 125
petits.
Le nombre d'exemplaires et les destinations sont :
- ESA : 10 exemplaires / 530 kilos
- MSDS : 6 exemplaires / 318 kilos
- Dornier : 1 exemplaire / 53 kilos
- CNES Toulouse : 2 exemplaires / 106 kilos
- CNES Paris : 1 exemplaire / 53 kilos
- DES-DSP : 5 exemplaires / 265 kilos
Les actions remontent
L'une des raisons du non-démarrage du programme est son coût,
de l'ordre du milliard d'unités de compte, qui fait peur à
certaines délégations. D'autres sont insatisfaites du retour
industriel qui s'annonce et ne donnent pas leur accord a priori.
Patiemment, les promoteurs du programme à l'ESA résolvent
les problèmes et, fin 1983, début 1984, le financement de
l'Agence réapparaît pour une préphase C de six mois.
Celle-ci est encourageante pour la suite de l'affaire car son coût
est déductible de celui de la phase C/D, à la demande, très
formelle, de l'ESA.
L'équipe de DES se reconstitue peu à peu autour du nouveau
chef de projet, Claude Argagnon, qui voit son futur projet passer par tous
les stades, y compris celui de la mort clinique : «Le projet ERS
n'existe pas, M. Chaussedoux l'a dit !», s'est-il, en particulier,
fait dire à l'entrée du bureau d'études.
C'est finalement un Conseil de l'ESA, tenu les 28 et 29 novembre 1984,
qui décide la poursuite du programme et la mise en oeuvre de la phase
C/D. Le «kick off» est donné par Dornier le 4 décembre
1984 et la réunion de «kick off» entre MSDS et ATES
a lieu en janvier 1985.
La préphase C/D a pour but de régler quelques problèmes
système (à quoi sert donc le calibrage ?) : s'attaquer aux
points durs de la conception, mobiliser les fournisseurs pour un éventuel
démarrage, etc.
Parmi les craintes initiales des ingénieurs figure en particulier
l'effet «Multipactor», phénomène d'arrachement
d'électrons qui peut devenir résonant sous certaines conditions,
interrompre le signal et éventuellement dégrader l'état
de surface des guides ou dispositifs hyperfréquence. L'impulsion
de 5 kW crête cause bien des soucis, et la réalisation d'un
banc de test susceptible de délivrer réellement la puissance
est à l'ordre du jour.
Alcatel Thomson Espace, intéressée par la perspective
de disposer de ce site d'essais, fait une proposition en ce sens à
l'ESA avec l'entreprise Dateno et un tubiste américain. Elle n'aura
pas de suite, du moins pour elle. C'est finalement le «projet»
qui, sur les «retours» français, paye cette installation
aux Anglais, à Dateno et au tubiste américain. Un mauvais
goût restera un certain temps dans la bouche de l'équipe Alcatel
Thomson Espace.
En ce qui concerne le matériel qu'ATES s'apprête à
fournir ou à acheter à des partenaires européens,
les éléments critiques sont français. Il s'agit notamment
des lignes à ondes de surface, filtres dispersifs réalisant,
à l'émission, l'étalement de l'impulsion radar avant
amplification de puissance et, à la réception, sa compression
après préamplification. Thomson-CSF/DASM (Valbonne) doit
réaliser ces composants, et Jacques Richard part les rejoindre.
Pour sa part, au titre des équipements, ATES doit fournir une
enceinte thermostatée de haute précision pour garantir la
stabilité des performances, et toute l'électronique associée.
Thomson-CSF Montreuil a en charge les commutateurs en guide à
ferrite qui, mis en anneau de six, permettent d'assurer les redondances
de HPA et les interfaces avec les différentes antennes de l'AMI
(véritable couteau suisse de l'espace, avec trois antennes «scatt»
et une antenne SAR), ainsi que les limiteurs, destinés à
isoler les récepteurs pendant l'émission de l'impulsion.
Comme un radar doit recevoir exactement la fréquence d'émission,
au Doppler près, cette fonction, qui ne peut être réalisée
par filtrage, est vitale.
Thomson Montreuil a proposé un dispositif très performant
qui élimine automatiquement toute impulsion dépassant un
certain seuil, grâce à l'autopolarisation instantanée
de diodes PIN. L'électronique proprement dite, notamment la partie
à fréquence intermédiaire, doit être étudiée
concurremment par Thomson-CSF/AVS (Malakoff) et ATES.
En particulier, la technologie «CMS» (composants montés
en surface), maîtrisée par Malakoff pour l'avionique, doit,
pour la première fois, être spatialisée par Toulouse.
Depuis la fin de 1983, la séparation entre la Division Espace
et Thomson-CSF a commencé pour aboutir à la création
d'ATES.
Les relations avec la Division AVS de Thomson-CSF, qui a apporté
une assistance technique dans le domaine radar, doivent donc être
définies d'une manière plus formelle qu'elles ne l'ont été
au sein d'une même société. Un accord est négocié
dans ce sens, non seulement pour le programme ERS 1, mais également
pour tout ce qui peut concerner, dans l'avenir, les radars embarqués
à bord des satellites.
Cet accord, signé le 5 juin 1985, s'inscrit dans le cadre de
l'accord général signé entre la CGE et Thomson, où
il est précisé que le domaine des matériels embarqués
à bord de satellites est attribué à la CGE, Thomson-CSF
conservant, bien entendu, son expertise dans le domaine des radars. Outre
ce domaine particulier, il couvre également celui des matériels
de visualisation dérivés de ceux développés
pour Spacelab, les techniques de pointage utilisant le laser, les
méthodes de localisation, de pointage et d'accostage pour les véhicules
spatiaux, et l'utilisation de l'infrarouge et de l'holographie.
L'équipe industrielle
Parmi les fournisseurs européens d'ATES choisis pour les
nécessités de retour industriel du fait du financement du
programme ERS, il faut signaler deux faux départs. D'une
part, Bell Telephone à Anvers, sollicitée pour réaliser
le banc de test intégration du «RF subsystem», annonce
que, surchargée, elle déclare forfait mais propose une société
suisse, CIR, à Gals. D'autre part, Christian Rovsing, retenu pour
réaliser quelques convertisseurs d'alimentation et le «Switch
matrix controller», dépose son bilan. On fait alors reprendre
les engagements de l'ancienne société par la nouvelle.
Les partenaires d'ATES comptent, outre les sociétés susmentionnées,
Ericsson, chargée de réaliser les convertisseurs FI/RF et
le générateur de fréquences, dont l'oscillateur ultrastable
sera fourni par FEI.
Côté client, trois étages hiérarchiques s'occupent
d'ATES : Marconi, Dornier et l'ESA. Marconi (MSDS : Marconi Space and Defence
Systems) deviendra plus tard Matra-Marconi Space, et son usine de Portsmouth
se partage entre le spatial et les torpilles, usine que le «groupe
projet» local ignore jusqu'à l'achèvement de nouveaux
bâtiments.
Pendant deux ans, l'équipe ERS est logée en plein
Portsmouth, face au port et à l'entrée de l'arsenal, dans
un bâtiment de bureaux en location appelé «Warrior House»,
du nom du premier vapeur de la marine britannique, visitable et mouillé
à quelques mètres de ces bureaux.
Mais à l'époque, l'amateur de marine a quand même
de quoi faire. Qui des visiteurs de l'équipe ERS de Marconi
n'a pas «séché» une fois le repas de midi pour
visiter, au sein de l'arsenal, le Victory, toujours officiellement
en service, mais en cale sèche, et le Mary Rose, coulé
devant l'île de White par son surarmement qui l'a rendu instable,
et repêché quelques siècles plus tard en assez mauvais
état.
Marconi est responsable de l'instrument AMI (Active Microwave Instrument),
et dans ce cadre est le client direct. Ses activités industrielles,
hormis le management, l'ingénierie et l'intégration de l'instrument,
portent sur la réalisation de l'équipement de gestion de
l'instrument en mode SAR et de numérisation du signal reçu,
le SAR Processor, monstre (pour l'époque, où les «Asics»
n'existent pas) avec ses 50 kilos d'électronique et sa face avant
couverte de connecteurs. L'intégration de l'instrument est faite
à Portsmouth, ainsi que les essais de «Multipactor».
Une tradition sur ERS 1 semble être le choix du chef de
projet-instrument parmi les Écossais. D'abord, c'est Bill Jackson,
un instant remplacé par Ian Mac Millan, et finalement remplacé
par Joe Mac Caughey.
Dornier, à Friedrichshafen, est responsable de l'ensemble du
satellite, et donc le client de Marconi. L'interlocuteur d'ATES est pendant
la durée de l'affaire Hermann Bottger, secondé par un autre
ingénieur, qui est, pendant un temps, Félix Petz, aujourd'hui
à l'ESA, à qui succédera Jurgen Fritz.
L'équipe ESA de l'AMI est pilotée par un Allemand, Georg
Graf, secondé par deux Anglais, Bob Gelsthorpe et David Hounam,
et un Espagnol, Juan Guijarro. Il n'y a pas, pour ainsi dire, de réunion
contractuelle, avancement, revue, mise en recette, etc. chez ATES ou l'un
de ses fournisseurs sans que les trois organismes clients participent,
et souvent à plusieurs ingénieurs.
La bataille des spécifications
Dès le démarrage, ATES est en retard, ce qui est humain
! Ce qui l'est moins, c'est la situation des clients. La définition
du système est peu mûre et l'encre pour écrire des
spécifications se fige, en particulier chez Marconi.
L'équipe projet toulousaine est prise en étau entre des
laboratoires qui affichent des délais peu conformes à ce
que demande le client et exigent de voir figer leurs demandes, et le client
qui trouve assez prématuré de s'avancer à préciser
ce qu'il veut, tout en souhaitant être livré à l'heure.
Elle doit donc investir dans la rédaction des spécifications
Alcatel en prenant en compte sa connaissance de l'état technique
du projet, et indiquer au client que faute d'autre chose de sa part, ou
d'un signal d'arrêt clair, c'est sa base technique qui deviendra
contractuelle.
Marconi ne revient vers ATES qu'un an après avec un document
de son cru pour chacun des sous-systèmes. Il y a, bien sûr,
des écarts à chaque ligne, ou presque. Plusieurs mois sont
nécessaires, des séminaires ad hoc et l'action des
clients de rang supérieur pour qu'un accord soit trouvé.
Celui-ci entraîne une vague de demandes de modifications contractuelles
qui s'ajoute à celle liée au démarrage chaotique de
l'affaire.
Ces deux premières vagues sont traitées dans le cadre
de la négociation du contrat de phase C/D qui règle le sort
d'une soixantaine d'entre elles. Sur la totalité de la durée
de l'affaire, plus de cent modifications contractuelles seront émises,
et une quantité raisonnable d'entre elles acceptées avec
un délai moyen de l'ordre d'un an.
Le contrat de phase C/D
Compte tenu du risque technique de l'affaire et du manque de références
techniques tant du client ESA que des industriels, le contrat de phase
C/D est pour les principaux contractants un contrat en dépenses
contrôlées avec intéressement. ATES peut bénéficier
d'un tel contrat.
Ses fournisseurs, dans le groupe Thomson ou ailleurs, ont par contre
des contrats à prix fixes. Il faut plus d'un an pour conclure les
accords sur les conditions des contrats avec les fournisseurs, l'ESA intervenant
directement dans la phase finale de négociation des prix, quel que
soit le niveau du fournisseur dans l'organisation du projet.
En ce qui concerne ATES, le problème le plus difficile à
résoudre est celui des taux horaires, bien plus important que les
multiples modifications identifiées depuis l'offre, le gonflement
de devis que le contrôleur de projet François Witrand recueille,
ou le montant même du prix objectif à atteindre, point de
départ du calcul de l'intéressement.
En effet, les taux horaires ont à peu près doublé
depuis la proposition, car à l'époque l'activité spatiale
n'est qu'un département d'une division de Thomson dont elle reprend
les EGC (éléments généraux de coûts)
établis sous le contrôle de l'Administration. La filialisation
et le transfert à Toulouse, avec des moyens techniques et industriels
adaptés mais spécifiques, ont eu un impact certain sur les
taux horaires. C'est une chose à faire accepter à l'ESA,
car dans un marché en dépenses contrôlées, le
taux horaire est un facteur commun de toutes les recettes.
La négociation conduite par Jean-Benoît Nocaudie dure de
longs mois au terme desquels les taux proposés sont acceptés
par le client, grâce au soutien du CNES et de la DGA. L'ESA fait
même preuve de bienveillance dans la fixation des termes des intéressements,
notamment sur les points techniques où il est possible de faire
«carton plein». Toutefois, un désaccord concernant l'intéressement
de «solidarité» sur les performances en vol du satellite
reporte à plus tard la signature du contrat.
Toute la phase C/D est en fait financée par des engagements provisoires
de l'ESA (Limit Of Liability), et le contrat final n'est signé que
très peu de temps avant le lancement du satellite.
La bataille des plannings
Le programme a démarré d'une manière classique
: tout le monde est déjà en retard. Notamment, Alcatel Thomson
Espace, qui affiche des délais très importants pour le développement
des équipements les plus complexes : «calibration unit»
et «IF radar», tous deux contenant des dispositifs à
ondes de surface dans des enceintes thermostatées et ayant recours
à la technologie «CMS».
Et encore, le chef de projet ne montre pas ce que le Département
Équipement lui transmet, mais ce qu'il souhaite obtenir ! À
cette époque, il apprécie tout particulièrement Ericsson
qui n'éprouve aucune difficulté à fournir des plannings
conformes aux exigences de l'affaire, et il les donnerait volontiers en
exemple à la Division Équipement (DEQ). Il est vrai que l'équipe
est encore jeune dans le métier !
Les livraisons de maquettes fonctionnelles et les «PDR»
(Preliminary Design Review) se passent à peu près bien pour
tous les fournisseurs, et le test en intégration du «RF system»
commence. Cette opération, heureusement non contractuelle et en
temps masqué par rapport aux travaux sur les MI (modèles
d'identification) contractuels, dure le temps nécessaire pour que
le banc de test livré par CIR fonctionne, c'est-à-dire un
bon semestre et quelques nocturnes. Le peloton commence à s'étirer
pour les livraisons de MI et les «CDR» (Critical Design Review).
Les vrais ennuis apparaissent alors : Ericsson revendique la place du
cancre. «Unfortunately
» est la formule de reporting la plus
fréquente. Thomson Montreuil a des ennuis techniques sérieux
sur son limiteur miracle : les diodes, leur technologie d'assemblage, le
montage, le «multipactor», tout y passe.
Le «circulator assembly» apparaît critique pour d'autres
raisons, il faut d'abord trouver le bon «ferrite», qui encaisse
la puissance mais présente peu de pertes. Gérard Forterre
trouve finalement la bonne formule, avec juste ce qu'il faut de dysprosium.
En parallèle, la réalisation des modèles de vol devrait
démarrer.
L'ESA a mis en place sur cette affaire une centrale commune d'approvisionnement
de composants, afin d'ouvrir le programme aux industriels de petite taille
incapables d'approvisionner dans des conditions économiques des
composants «Hi-rel», et, pour «amortir l'opération»,
l'a rendue obligatoire pour tous. ATES a dénoncé cette approche,
mais, devant la pression de l'ESA, s'est inclinée, à l'exception
des transpondeurs pour lesquels l'approvisionnement des composants est
fait globalement par tranches de cinq équipements.
La plupart des composants doivent être fournis par l'une des deux
centrales retenues, IGG (Grande-Bretagne) pour les composants européens,
et TRW pour les composants US et japonais. Comme les dates de besoin des
différents équipementiers sont très proches, il en
résulte un embouteillage des centrales, aggravé par les évolutions
des listes, et les retards dans les expressions de besoins.
À l'heure où le câblage devrait commencer, malgré
la gesticulation de rigueur auprès des agences, les magasins de
Toulouse sont vides. C'est alors que, dans l'intérêt suprême
du programme, ATES propose d'ouvrir ses tiroirs et d'utiliser ses composants
en stock, reliquats d'affaires précédentes, pour avancer
le câblage des équipements critiques, avec l'avenant correspondant
qui est accepté.
Un nouveau fournisseur
Les nouvelles de Montreuil sont mauvaises depuis un certain temps,
en ce qui concerne le limiteur. Les diodes «de vol» ont pu
être fabriquées mais la structure porteuse, l'équipement
proprement dit, est percluse de problèmes mécaniques, maintien
des diodes, multipactor, dégazage, etc. L'ESA s'inquiète
sérieusement du fait que les problèmes se multiplient alors
que les solutions se font attendre.
L'équipe de Toulouse est convaincue de la viabilité du
principe, elle l'est moins des talents de l'équipe de Montreuil.
La question d'une solution alternative est de plus en plus précisément
évoquée, et Alcatel Thomson reçoit l'action d'instruire
le dossier. MaCom GB, qui avait réalisé un commutateur pendant
la phase des prédéveloppements, et EMS (Atlanta) sont alors
consultés.
Il faut abandonner la solution automatique pour une solution commandée,
moins simple mais ici plus facile à maîtriser techniquement.
Cela entraîne quelques modifications dans le harnais et le séquenceur.
EMS est choisi, et après d'âpres discussions où ATES
doit se faire prier pour admettre la nécessité d'une solution
alternative, il est admis que le contrat EMS sera payé par l'ESA,
les modifications du reste de la charge utile devant être payées
par Alcatel si Thomson Montreuil reste défaillante, ou par l'ESA
si le matériel Thomson est fourni et qualifié en temps utile.
Cette décision soulage tout le monde, et l'ESA est assez surprise
de voir avec quel dynamisme l'équipe de Toulouse met les choses
en place ! Quant à Montreuil, devenu Tekelec, il rate largement
le train ERS 1. Si la livraison d'un limiteur de vol qualifié
a lieu avant le tir ERS 2 et est fêtée dignement par
une soirée au Paradis latin, l'ESA ne fait pas l'effort de le monter
en remplacement du matériel EMS déjà en place.
Migrations
C'est à peu près vers l'époque de la livraison
des MI que le chef de projet se trouve confronté à un problème
particulier : la fuite de ses équipes vers l'ESA. Elles y sont encore
de nos jours. Yvon Menard, responsable du calibrage ; Christian Bassoua,
responsable EMC ; Bruno Naulais, ingénieur intégration ;
Jean-Luc Gerner, qui fait la conception de la «FI radar», tous
quatre prennent le chemin de Noordwijk.
Cette vague est d'une certaine manière le pendant de la vague
d'embauches par ATES de personnels de l'équipe Observation de l'ESA,
lorsqu'elle fut transférée de Toulouse à Noordwijk
en 1983.
L'enlisement nordique
Les soucis en matière de livraison de matériel se
focalisent très vite sur Ericsson, les MI sont particulièrement
en retard et doivent être profondément modifiés pour
être acceptés ; pour les MV (modèles de vol), la conception
n'est pas davantage maîtrisée, et les règles de qualité
font obstacle aux solutions retenues pour faire marcher les MI. L'équipe
locale, très jeune et très dynamique, n'a pas son pareil
pour boire les paroles des visiteurs mécontents, reconnaître
ses torts, prendre toutes les actions possibles
et, apparemment, ne rien
faire jusqu'à la prochaine visite.
Devant cette technique de l'édredon, il reste l'arsenal habituel
: «management meeting» à l'ESTEC, mise en place d'un
résident (de nationalité française), missions hebdomadaires
(«unfortunately» se dit «Tüvair» en suédois,
le chef de projet de l'époque s'en souvient encore !), étude
de solutions alternatives, tout cela continue jusqu'au lancement. L'intégration
des sous-systèmes se fait en grande partie sans le matériel
de vol Ericsson, qui est livré au dernier moment.
Après la livraison
 Les
dernières livraisons des modèles de vol d'ATES ont lieu courant
1989. Les
dernières livraisons des modèles de vol d'ATES ont lieu courant
1989.
Il est possible de revoir ERS à Toulouse quand le satellite
complet est testé dans les installations d'Intespace, puis il part
à Kourou. Le premier créneau de tir prévu pour le
3 mai 1991 est, suite à une alerte sur le système de propulsion
d'Ariane, repoussé de deux mois jusqu'au 16 juillet, où
le vol 44 quitte la Guyane.
Quelques jours après, l'ESA publie la première image radar
: une vue des côtes de Hollande faite indépendamment de la
couverture nuageuse. On peut contempler les structures dessinées
par la variété des gris de la mer, en fonction du niveau
des vagues, des courants et des sillages de navires. Les antennes de l'AMI
se sont bien déployées, et l'instrument fonctionne dans sa
totalité. Plusieurs années d'efforts sont récompensées.
Et puis, pour les amateurs de formalisme, on peut signaler la signature
du contrat en juin 1991. C'est quand même avant le tir, mais il faut
qu'Ariane y mette du sien.
ERS 2, le frère cadet
 Un
deuxième satellite est, à l'origine, prévu en option.
Les difficultés de financement l'ont fait rapidement disparaître
des plans et des budgets. Le succès technique d'ERS 1 incite
l'ESA à lancer la réalisation d'un deuxième modèle
de vol. Un
deuxième satellite est, à l'origine, prévu en option.
Les difficultés de financement l'ont fait rapidement disparaître
des plans et des budgets. Le succès technique d'ERS 1 incite
l'ESA à lancer la réalisation d'un deuxième modèle
de vol.
Côté ATES, pour s'accommoder du budget français
disponible après la prise en compte de la plate-forme MATRA, il
faut trouver des économies ou des transferts. ATES se limite à
fournir des équipements non intégrés, Marconi prenant
à sa charge l'intégration des sous-systèmes sur le
panneau, ainsi que le management des sous-traitances d'Ericsson, en soulignant
que l'affaire Eutelsat les oblige par ailleurs à être très
présents à Goetoborg, chez Ericsson qui est l'un des fournisseurs.
De même, Alcatel Kirk voit ses tâches augmentées
par la fabrication sur plans, dite «built to print», de la
paire de séquenceurs et des convertisseurs d'alimentation des équipements
«calibration et IF radar», naguère produits par Toulouse.
Roger Saturnin est désigné chef de projet, et la phase
C/D débute à l'automne 1990 avec un contrat à prix
fixe qui est signé début avril 1992.
 Bien
qu'en principe identique à son frère aîné,
ERS
2 a droit à quelques ennuis inédits. L'un d'entre eux
est, après la perte d'une broche de connecteur sans raison apparente,
le rebut complet des dispositifs à ondes de surface modèles
de vol produits par Thomson/DASM, victimes de «stress corrosion»,
suite à un nettoyage malencontreux avec un produit chloré. Bien
qu'en principe identique à son frère aîné,
ERS
2 a droit à quelques ennuis inédits. L'un d'entre eux
est, après la perte d'une broche de connecteur sans raison apparente,
le rebut complet des dispositifs à ondes de surface modèles
de vol produits par Thomson/DASM, victimes de «stress corrosion»,
suite à un nettoyage malencontreux avec un produit chloré.
Le «circulator assembly» MV2 est, lui aussi, rebuté
suite à une intervention malheureuse. Cette pièce imposante
ne pouvant être refaite dans les délais, c'est le modèle
de rechange, précédemment écarté pour ERS
1, qui est choisi et qui vole. ATES a la satisfaction de livrer avant
Ericsson qui, dans l'ensemble, n'a pas démérité sur
ce contrat et apporté un certain nombre de solutions à ses
difficultés précédentes.
Le satellite est lancé le 21 avril 1995. Quand sa recette commence,
quelques difficultés se font jour. Notamment, des arrêts de
l'instrument en mode imageur sont observés. L'enquête montre
que le dispositif de protection du radar contre un TOS trop élevé
de la voie émission n'est pas réglé comme il faut.
Petit savoir-faire qui n'a pas traversé la Manche ? Quoi qu'il en
soit, il faut apprendre à vivre avec ce défaut. Par ailleurs,
de l'effet «Corona» est observé dans les tout premiers
temps de la vie orbitale de l'instrument, problème attribué
à un dégazage insuffisant du satellite à la première
mise sous tension.
Depuis cette date, la principale menace qui pèse sur les deux
satellites est sans doute la suppression possible d'une ligne budgétaire
suffisante pour que l'ESA puisse assurer les opérations nécessaires
à leur usage en orbite, lesquels n'ont aucune vocation commerciale,
contrairement au programme canadien Radarsat, mis en orbite après
les deux ERS.

Les transpondeurs d'ERS
En parallèle avec les péripéties qui marquent
la fourniture des sous-systèmes de l'AMI, ATES doit fournir, pour
les satellites ERS 1 et ERS 2, les transpondeurs du sous-système
TM-TC de la plate-forme. Celle-ci étant la même que pour les
satellites SPOT où ATES a déjà été
retenu pour cette fourniture, il n'y a aucune compétition et l'affaire
ne donne lieu à aucun problème particulier.
Deux modèles de vol et un modèle de rechange de transpondeurs
de la première génération sont livrés pour
ERS
1.
Pour ERS 2, la deuxième génération de transpondeurs
existe déjà, mais certaines interfaces étant différentes,
des modifications ont été nécessaires. Par mesure
d'économie, l'ESA n'accepte pas cette solution et se contente d'utiliser
le modèle de rechange déjà livré pour ERS
1 et de commander un seul modèle de vol supplémentaire
de la première génération. |